
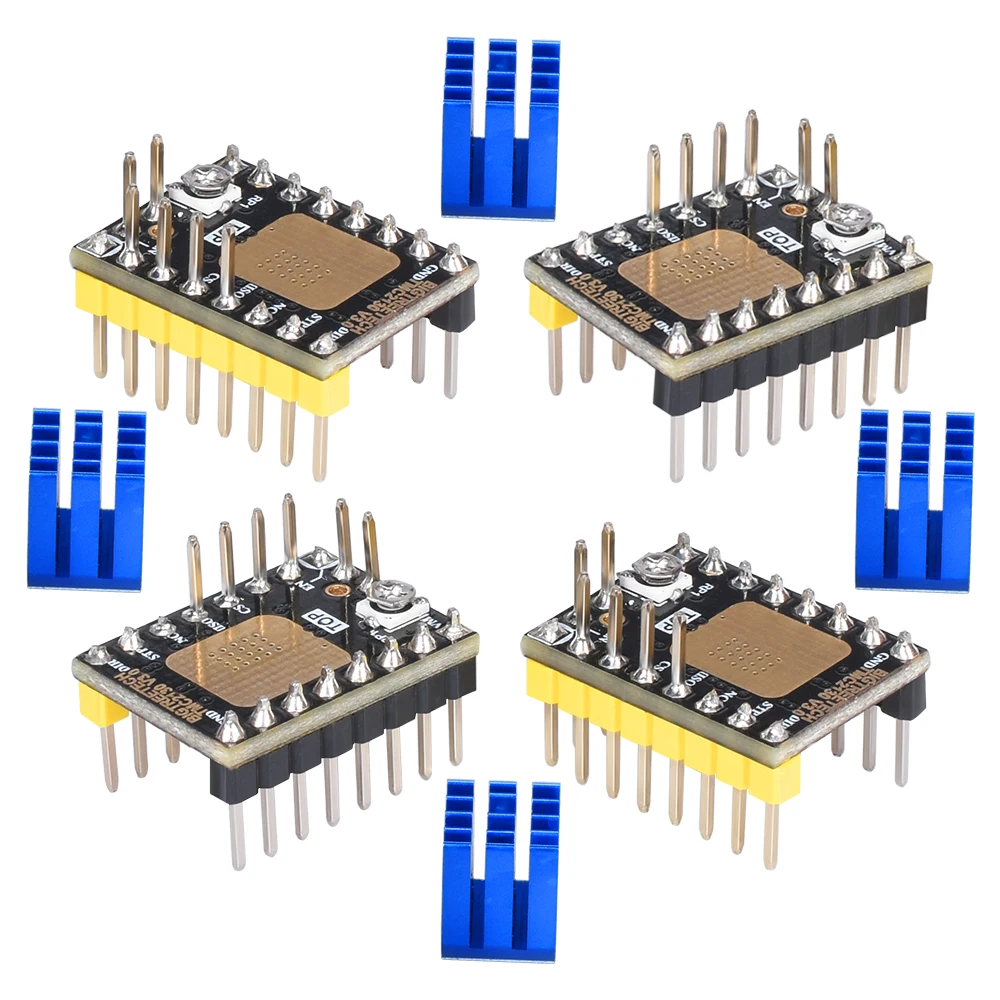
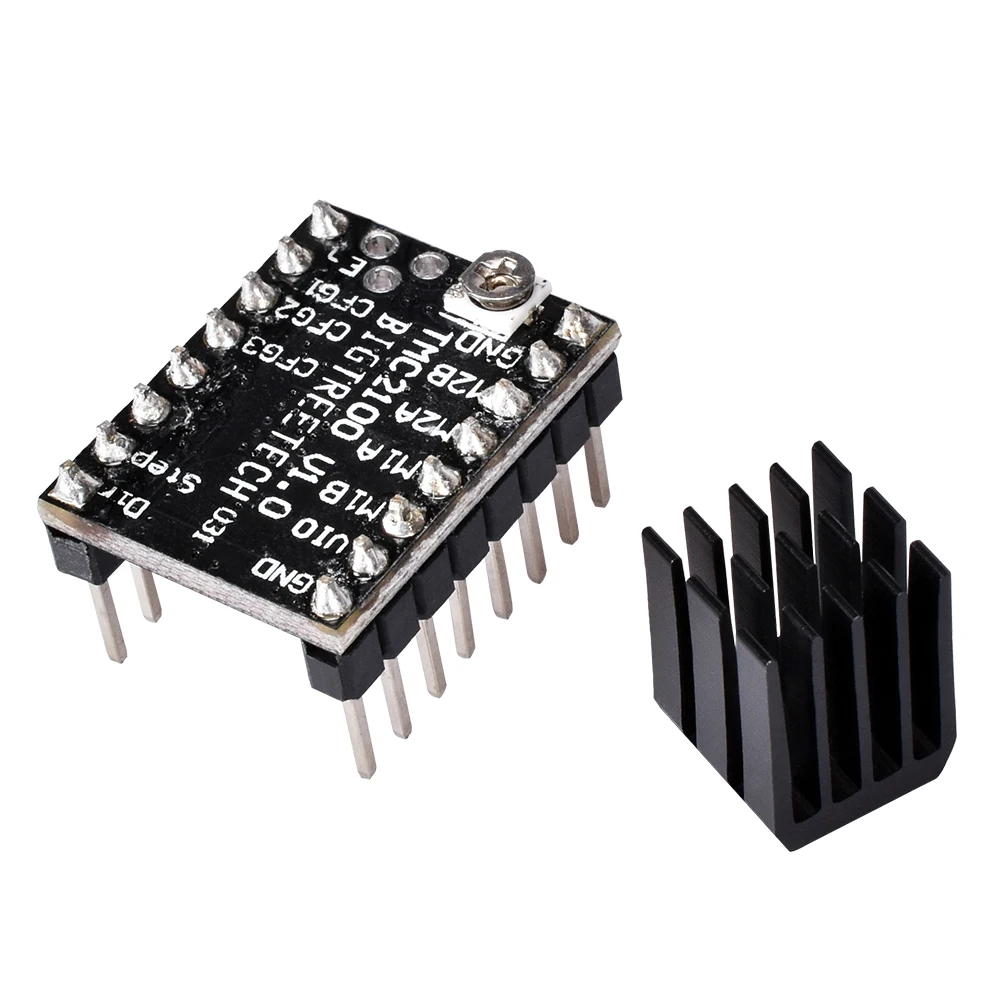
TMC2130 V1.1 TMC2208 TMC2100 шаговые двигатели Драйвер Stepstick Mute драйвер мкс для 3d принтеры запчасти пандусы 1,4 1,5 1,6 управление доска
Цена: $3.17
есть в наличии
Описание
Для получения дополнительной информации TMC2208 V3.0 или TMC2130 V3.0, вы можете перейти по этой ссылке:
Https://www.aliexpress.com/item/33021896289.html?storeId=1736565&spm=2114.12010611.8148356.3.3028695e8OAmPT




TMC2208 V3.0 руководство/GitHub:
Https://github.com/bigtreetech/BIGTREETECH-TMC2208-V3.0
TMC2130 V3.0 руководство/GitHub:
Https://github.com/bigtreetech/BIGTREETECH-TMC2130-V3.0
TMC2208 V3.0Параметры:
Конфигурация: Dir/шаг/UART
Микрошаги: до 1/256
Микроплер: 1/2, 1/4, 1/8, 1/16, 1/32
Логическое напряжение: 3,3 V-5 V
Напряжение двигателя: 4,75-35 в
Фазовый ток двигателя: 1.2A RMS, 2.0A пиковый
TMC2130 V3.0Параметры:
Конфигурация: Dir/шаг/SPI
Микрошаги: до 1/256
MicroPlyer: 1/256
Логическое напряжение VI0: 3,3-5 В
Вход Напряжение: 12/24 V DC
Фазовый ток двигателя: 1.2A RMS, 2A пиковый
TMC2130 v3.0-высокопроизводительный двухфазный чип драйвера шагового двигателя со стандартным SPI интерфейсом и простым интерфейсом шаг/dir. Очень низкий уровень шума, драйвер высокой нагрузки не теряет шаг.
TMC2100 :
1, текущий алгоритм привода: i = Vref * 1,9/2,5, Vref по умолчанию около 0,65 в, поэтому по умолчанию
Ток 0.5A, максимальный ток 1A!
2, Vref измеряет Gnd и потенциометр среднего конца напряжения.
3, при измерении напряжения не должен подключаться мотор, или легко сжигать привод.
4, измерительное напряжение должно быть подключено к питанию, не просто Подключите USB блок питания.
Примечание: когда вы используете TMC2100, некоторые советы вам нужно следовать.
1, Отрегулируйте потенциометр специальной керамической отверткой. В противном случае накопитель легко повредится.
2, теплоотвод на блоке привода застревает к середине чипа (другой драйвер такой же), в противном случае, он может быть укоротен по току со следующим контактом.

TMC2130 V3.0/TMC2208 V3.0/TMC2100/кабель с ПВХ изоляцией
TMC2208 UART: сварка завершена UART
TMC2130 SPI: сварка завершена SPI ( Только TMC2130 SPI с кабелем)
TMC2130 DIY: нужно DIY SPI самостоятельно


TMC2208 "сделай сам":


TMC2208 UART:



TMC2130 "сделай сам":

TMC2130 SPI:




Кабель:

TMC2100:










TMC2208 V3.0 руководство/GitHub:
Https://github.com/bigtreetech/BIGTREETECH-TMC2208-V3.0
TMC2130 V3.0 руководство/GitHub:
Https://github.com/bigtreetech/BIGTREETECH-TMC2130-V3.0
Характеристики
- Бренд
- BIQU
- Тип товара
- Драйвер
- Номер модели
- TMC2208 V3.0
- Product Name
- TMC2130/TMC2208/TMC2100 Stepper Motor
- With Heat Sink
- Yes
- Superiority
- Super Silent
- TMC2130 Version
- V3.0
- Material
- PCB
- Driver Type
- Stepper Motor Driver
- Logical Voltage
- 3-5V
- Color
- Black
- Size
- 15.15*20.32MM
- Usage
- 3D Printer Parts
- Suitable For
- 3D Printer Motherboard
- Compatible For
- SKR V1.3/MKS GEN L/MKS GEN V1.4 3D Printer Board
















































































Для покупки товара TMC2130 V1.1 TMC2208 TMC2100 шаговые двигатели Драйвер Stepstick Mute драйвер мкс для 3d принтеры запчасти пандусы 1,4 1,5 1,6 управление доска нажмите кнопку "купить сейчас".
Если вы хотите купить другой товар из категории компьютерная техника и по или офисная электроника то перейдите по ссылкам вверху страницы.